Chirp profile (7-22 kHz)

Chirp profile (3-8 kHz)

Boomer profile (1 kHz)
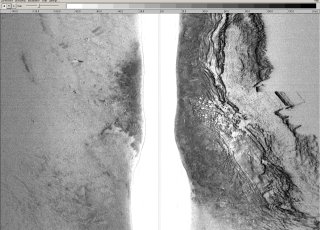
Side scan sonar image (400 kHz)
In conjunction with MD DSS, we often are asked to provide answers to two questions. First, what is multi-mode operation? Second, how much sediment penetration can we expect to get with MD DSS? Below we will address these two issues.
Not surprisingly, with multi-mode
operation we refer to the system's ability to function in
different modes. MD DSS supports the following operation modes:
| Mode | Type | Description |
|---|---|---|
| Pinger | Active | Sub-bottom profiling using a fixed frequency sound pulse in the range 1 kHz to 50 kHz |
| Chirp | Active | Sub-bottom profiling using frequency modulated sound pulses in the range of 500 Hz to 50 kHz |
| Seismic | Active or passive | Acquisition of seismic reflection data, resulting from a sound pulse generated either by MD DSS or a separate seismic source such as an air gun, boomer or sparker operating in the range of 20 Hz to 2 kHz |
| Side scan | Passive | Acquisition of acoustic reflection data from a side scan sonar system operating at a frequency of, e.g., 100 kHz or 500 kHz |
Below are examples of data acquired with MD DSS in different
modes:
Chirp profile (7-22 kHz) |
Chirp profile (3-8 kHz) |
Boomer profile (1 kHz) |
Side scan sonar image (400 kHz) |
MD DSS multi-mode operation allows multi-faceted, single-pass surveys to be carried out with just one system.
Penetration varies with frequency and material. As a
general rule, the lower the frequency, the better the penetration.
With all other factors constant, a lower frequency travels a
longer distance. Rougher materials are better at absorbing sound
waves.
When addressing the issue of sediment penetration, many actors in
the industry like to present impressive numbers. Considering the
above facts, however, this approach turns out to be misleading.
Being dependent on sediment composition to such a high degree,
penetration can hardly be expressed in numbers applicable to more
than just one particular location and its stratigraphic
conditions.
To demonstrate the penetration capability of different acoustic
methods, below we present some example profiles.
 Pinger profile (24 kHz) |
 Chirp profile (2-6 kHz) |
The above two profiles portray the subsea geology along a fairway in the Baltic Sea. At places, penetration differs markedly.
 Pinger profile (24 kHz) |
 Boomer profile (500 Hz - 1.5 kHz) |
In this pair of profiles, there is an even more noticeable
difference in penetration.
 Pinger profile (28 kHz) |
 Air gun profile (100 Hz) |
Finally, above is a pair of profiles from quite the opposite ends of MD DSS's operating frequency spectrum. Although the frequencies are several orders of magnitude apart, the difference in penetration is hardly perceptible.
For acquisition of this survey data and for permission to publish views thereof, we would like to thank Tele1Europe in Finland, Geological Survey of Finland, Primatel Ltd, Stockholm university, Department of Geology and Geochemistry, and University of Sao Paulo, Institute of Oceanography.